Muscle control interface
Robot control with muscle electro-signals
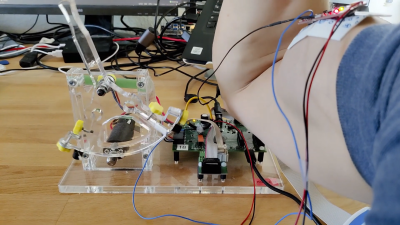
Reading the body electric signal, then processing them on a microcontroller to remoise the noise, and using it to control a motor via PID.
The project was successfully done in close collaboration with Florian Richter for the EPFL master class MICRO-553 Haptic human robot interfaces.