Trajectory prediction
Predicting the trajectory of people using Deep Learning
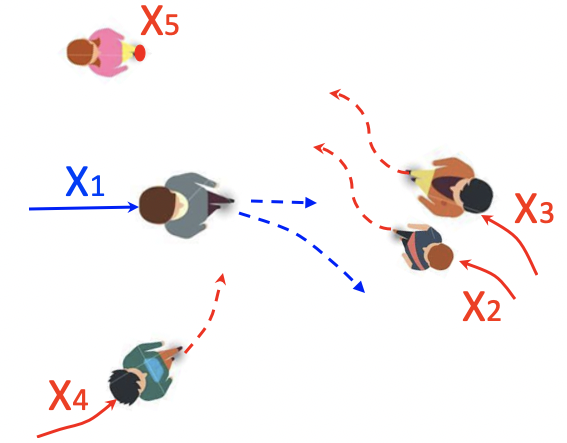
In the context of autonomous cars, predicting the future trajectories of humans can be helpful to avoid an accident. However, due to the complex human-human interaction, it is a difficult problem.
Using real and simulated dataset, this project achieves this task using Deep Learning methods.
The best performance where obtained via negative sampling, a contrastive loss and a SGAN like architecture
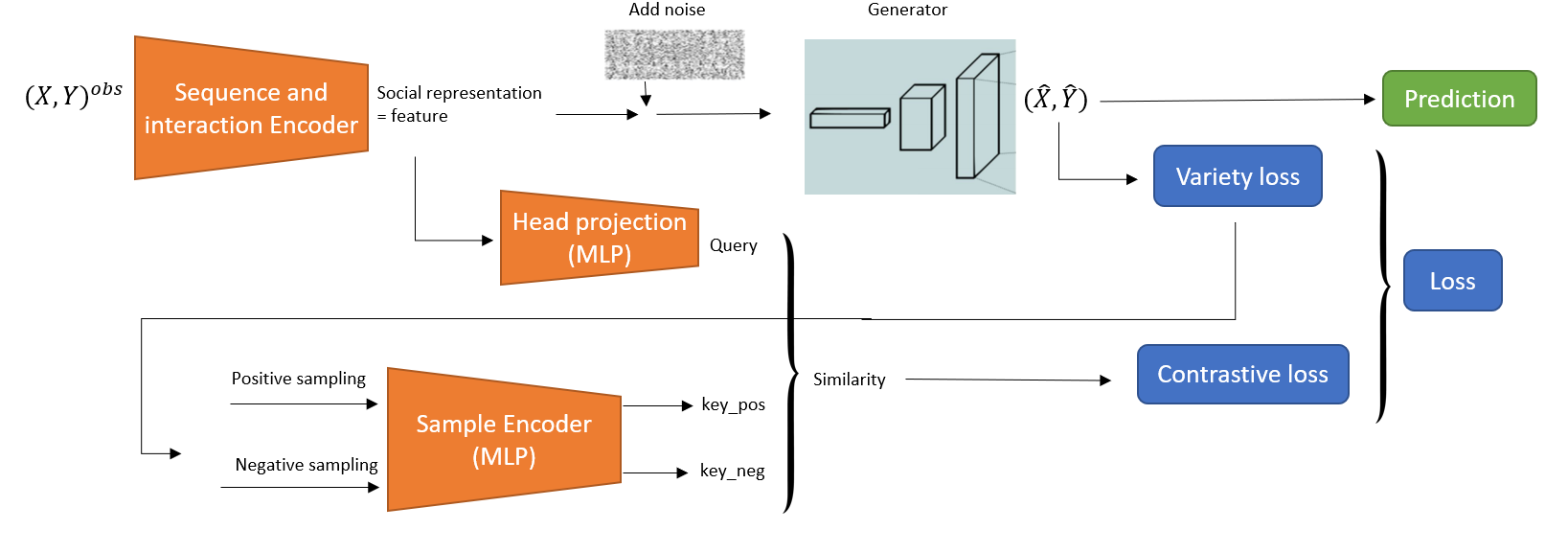
Neural network architecture
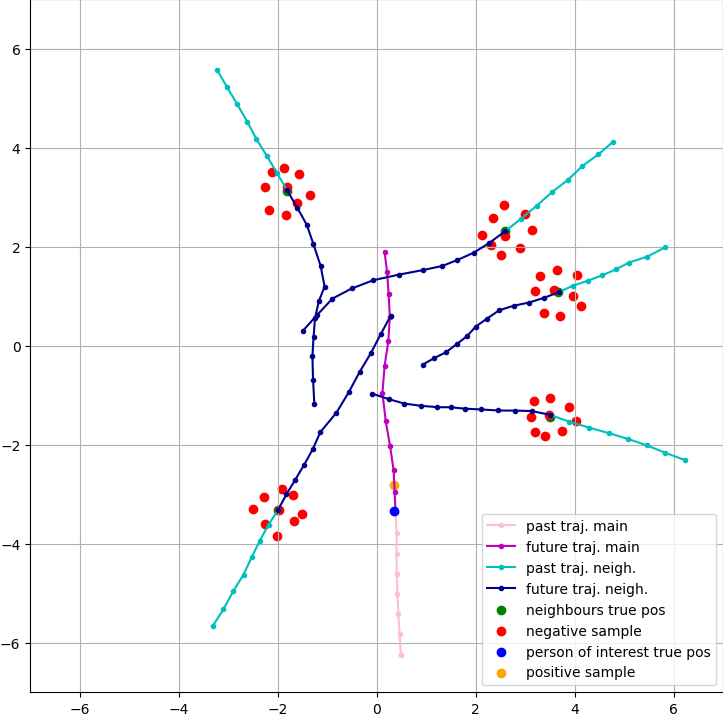
Results visualization
This project was written in Python using the Pytorch framework.
This project was successfully done in close collaboration with Anthony Guinchart and Robert Pieniuta.